Bio
Welcome! I am currently a CS Ph.D. student at PRG (Perception and Robotics Group), University of Maryland - College Park, advised by Prof. Yiannis Aloimonos and Dr. Cornelia Fermuller. I am also working with Dr. Ji Zhang in CMU. Formerly I was a visiting student in Fast Lab, Zhejiang University (ZJU), advised by Prof. Fei Gao.
My research interests are Interactive Perception & Learning & Motion Planning for Manipulation and Navigation. I am especially interested in systematic solutions that make the robot system actually work in field scenarios. I hope to build a useful robot that can actually improve someone's life.
I open source most of my research, please check my Github for more infomation.
If any repository does not work for you, please report an issue or drop me an email.
If it does not work at all, please kick me.
If you are interested in my research or would like to have a talk, feel free to drop me an email.
Selected Publications
All publications on Google Scholar.|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Experiences
-
Honda Research Institute USA May, 2025 - Aug, 2025Research Intern
Advised by Dr. David Isele. -
Carnegie Mellon University May, 2023 - NOWVisiting Student
Advised by Prof. Ji Zhang. -
University of Maryland Sep, 2022 - NOWPh.D. Student in Computer Science
PRG (Perception & Robotics Group). Advised by Prof. Yiannis Aloimonos and Dr. Cornelia Fermuller. -
Zhejiang University Feb, 2020 - Aug, 2022Visiting Student
FAST (Field Autonomous System & compuTing) Lab. Advised by Prof. Fei Gao. -
Nanjing Institute of Technology Sep, 2018 - June, 2022Undergraduate
Major in Robot Engineering.
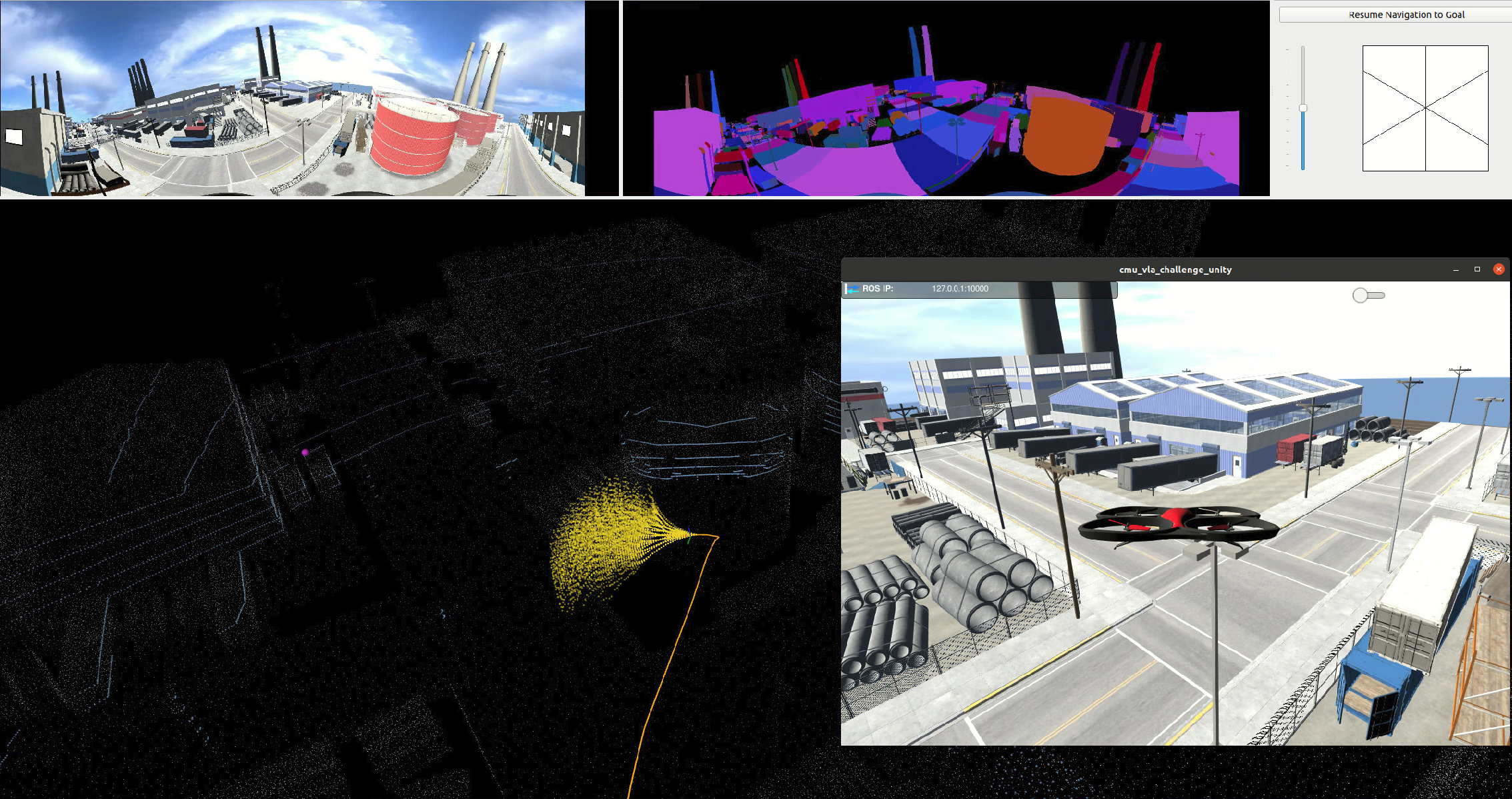
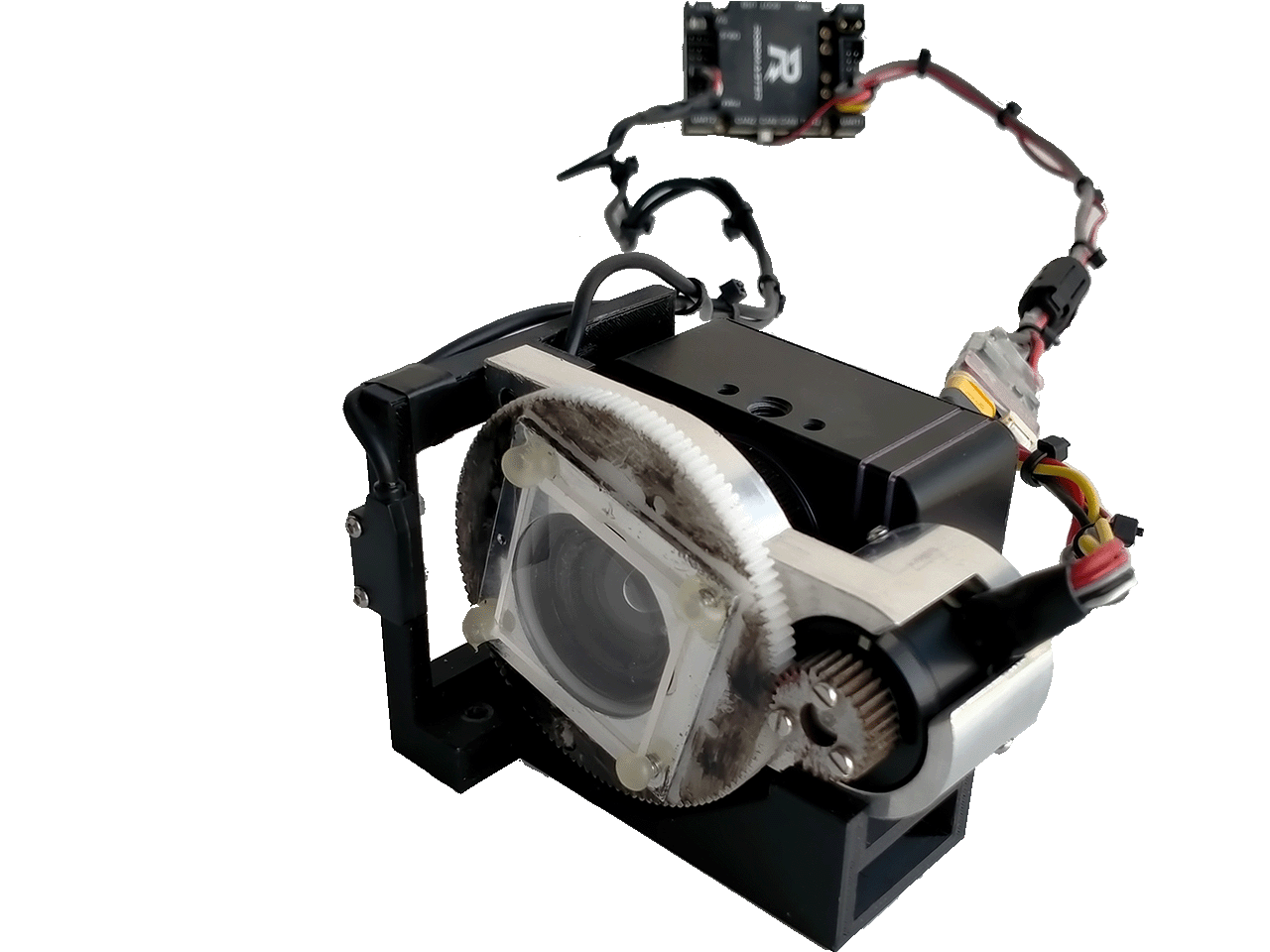
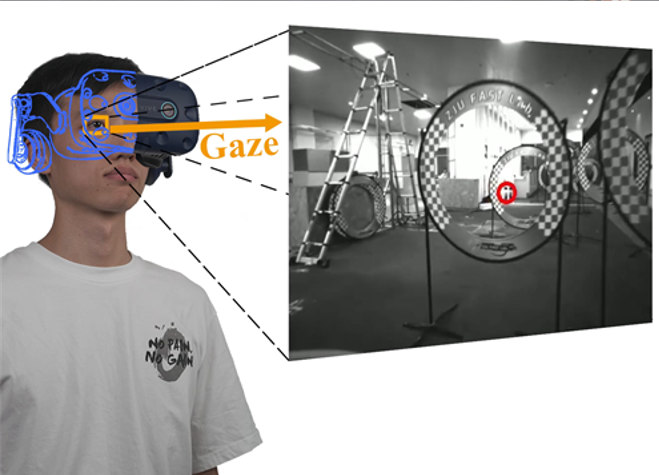
Robot Systems I Built with Friends



Acknowledgement
This website uses the website design and template by Martin Saveski